ųŪ─▄ęŲäėÖCŲ„╚╦«aśIĄ─║╦ą─“īäė┴”üĒūį╝╝ągäōą┬Ą³┤·Īó ł÷Š░ąĶŪ¾▒¼░lĪó š■▓▀┘Y▒Šų·═ŲĪó «aśIµ£│╔╩ņČÓš▀Ą─ģf═¼ū„ė├ĪŻ╬┤üĒ, ļSų°Al┤¾─Żą═ĪóŠ▀╔ĒųŪ─▄ (Embodied AI)Ą╚╝╝ągĄ─═╗ŲŲ, ÖCŲ„╚╦īóÅ─å╬ę╗╣”─▄╣żŠ▀" Ž“ " ūįų„øQ▓▀¾wn▀M╗», ▀Mę╗▓ĮØB═Ėų┴╔·«a┼c╔·╗ŅĄ─╚½ł÷Š░ĪŻ
1 ╝╝ąg“īäė: äōą┬═╗ŲŲ╝ė╦┘«aśI╗»
╚╦╣żųŪ─▄┼cÖCŲ„īW┴Ģ
é„ĖąŲ„┼cĖąų¬╝╝ąg
5G┼c▀ģŠēėŗ╦Ń
─ŻēK╗»┼c╚ßąįįOėŗ
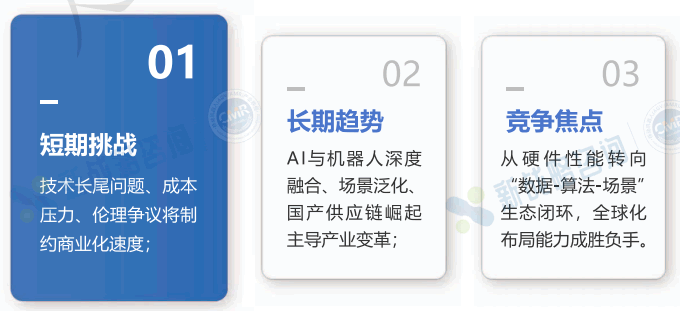
2 š■▓▀ų¦│ų: æ┬į┼c┘Y▒ŠāAą▒
«aśIš■▓▀Ę÷│ų
┘YĮ┼cČÉ╩š╝żäŅ
ś╦£╩┼cĘ©ęÄ═Ļ╔Ų
3 ╩ął÷ąĶŪ¾: ČÓŅIė“ł÷Š░▒¼░l
ųŲįņśI╔²JąĶŪ¾
╬’┴„┼cé}ā”ūįäė╗»
Ę■äšÖCŲ„╚╦ł÷Š░öUš╣
╠žĘNŅIė“äéąĶ
4 ╔ńĢ■ę“╦ž: ä┌äė┴”ĮYśŗąįūāĖ’
╚╦┐┌└Ž²g╗»┼cė├╣ż│╔▒Š╔Ž╔²
ę▀Ūķ┤▀╗»¤oĮėė|ĮøØ·
┐╔│ų└m░lš╣ąĶŪ¾
5 ┘Y▒Š┼c╗»:┘Yį┤š¹║Ž“īäėį÷ķL
’LļU═Č┘Y
╗Ņ▄S▓ó┘Å┼cæ┬į║Žū„
╗»╩ął÷═žš╣
6 «aśIµ£│╔╩ņ:ģf═¼ą¦æ¬’@¼F
ė▓╝■╣®æ¬µ£═Ļ╔Ų
▄ø╝■╔·æBķ_Ę┼╗»
┐ńĮń╚┌║Ž╝ė╦┘
Č╠Ų┌üĒ┐┤, ╣żśIł÷Š░Ą─╔ŅČ╚ØB═Ė┼cĘ■äšÖCŲ„╚╦Ą─ł÷Š░┴čūāīóų„ī¦į÷ķL; ķLŲ┌Č°čį, ╚╦ą╬ÖCŲ„╚╦Ą─┴┐«a═╗ŲŲ┼cŠ▀╔ĒųŪ─▄Ą─╔·æBśŗĮ©īóųž╦▄«aśIĖ±ŠųĪŻ Ų¾śIąĶŠ█Į╣╝╝ąg╔ŅĖ¹┼cł÷Š░┤╣ų▒╗», į┌│╔▒Š┐žųŲĪó ║ŽęÄ▀\ĀI┼c╗»▓╝Šųųąīżšę▓Ņ«É╗»ĖéĀÄā×ä▌, ĘĮ─▄į┌▀@ł÷ųŪ─▄╗»Ė’├³ųąš╝ō■Ž╚ÖCĪŻ
ÖCŲ„╚╦Ą─╚²éĆ╗∙▒Š╠žš„╩▄▀@ą®▀xō±╦∙ų¦┼õŻ║ÖCäėąįĪó┐╔┐žąį║═ĘĆČ©ąį;▒Ēųą├Ķ╩÷┴╦╠ž╩Ō▌åūėŅÉą═Ą─▀xō±║═ÖCŲ„╚╦Ąū▒P╔Ž╦³éāĄ─Äū║╬ĮYśŗ▀@ā╔éĆĘĮ├µ
į┌▀^╚źĄ─10─Ļųą,ęčĮøš╣╩Š┴╦Ė„ĘNŅÉą═Ą─│╔╣”Ą─ļp═╚ÖCŲ„╚╦,ę╗éĆųžę¬Ą─╠žš„╩Ū╦³éāŠ▀ėąŅÉ╦Ų╚╦Ą─═Ōą╬,▒žĒÜ▀B└mĄž▀Mąą╦┼Ę■ŲĮ║ŌąŻš²,═©▀^┼cŽ▐ųŲŽź╔wĻP╣ØĮŪČ╚Ą─Ī░Žź╔w╣ŪĪ▒ŽÓĮY║Ž,īŹ¼F┴╦¾@╚╦Ą─Ę┬╔·▀\äė
å╬═╚ÖCŲ„╚╦Ą─ų„ę¬└¦ļy╩Ū▒Ż│ųŲĮ║Ō,ÖCŲ„╚╦▒žĒÜų„äėĄžūį╬ęŲĮ║Ō,╗“š▀Ė─ūā╦³Ą─ųžą─,╗“š▀Įo│÷ąŻš²┴”,ÖCŲ„╚╦═©▀^š{╣ØŽÓī”ė┌╔Ē¾wĄ─═╚ĮŪŻ¼▓╗öÓĄžą▐š²╔Ē¾wū╦æB║═ÖCŲ„╚╦╦┘Č╚
į┌═╚╩ĮęŲäėÖCŲ„╚╦ŪķørŽ┬,į÷╝ėÖCŲ„╚╦═╚Ą─ūįė╔Č╚╠ßĖ▀┴╦ÖCŲ„╚╦Ą─ÖCäėąį,╝╚öU┤¾┴╦ÖCŲ„╚╦─▄ąąū▀Ą─ Ąžą╬ĘČć·,ėųį÷ÅŖ┴╦ÖCŲ„╚╦ęįĖ„ĘN▓ĮæBąąū▀Ą──▄┴”,╚▒³c╩ŪĦüĒäė┴”Īó┐žųŲ║═┘|┴┐ĘĮ├µĄ─å¢Ņ}
ų„ę¬ā׳c░³└©į┌┤ų▓┌Ąžą╬╔ŽĄ─ūį▀mæ¬ąį║═ÖCäėąį,─▄ė├Ė▀Č╚Ą─╝╝Ū╔üĒ▓┘┐vŁhŠ│ųąĄ─╬’¾w;╚▒³c░³└©äė┴”║═ÖCąĄĄ─Å═ļsąį,▒žĒÜ─▄ē“ų¦ō╬ÖCŲ„╚╦▓┐Ęų┐éųž┴┐
Š▀ėą╚½ĘĮ╬╗▌åĄ─ÖCŲ„╚╦ėą3éĆūįė╔Č╚▀\äėĄ──▄┴”,╝┤čžų° ŲĮ├µ╔Žx ▌S,y ▌Sęį╝░└@ūį╔Ēųąą─ą²▐DĄ─▀\äė─▄┴”,▀@│õĘųį÷╝ė┴╦ÖCŲ„╚╦Ą─ÖCäėąį,╚½ĘĮ╬╗ęŲäėÖCŲ„╚╦┐╔ęįė╔▓╗═¼öĄ┴┐Ą─╚½ĘĮ╬╗▌åĮM│╔
ļp▌å▓Ņ╦┘“īäėĄ─ęŲäėÖCŲ„╚╦Ą─▀\äėīW─Żą═, ╝┤ėæšōĮoČ©ÖCŲ„╚╦Ą─Äū║╬╠žš„║═╦³Ą─▌åūė╦┘Č╚║¾,ÖCŲ„╚╦Ą─▀\äėĘĮ│╠,ÖCŲ„╚╦ėą2éĆų„äė▌åūėŻ¼Ė„Š▀ų▒ÅĮr, ā╔▌å▌åķgŠÓ×ķl
¤oųąķg£p╔┘é„äėŁh╣Ø╗“ć¦║ŽŁh╣Ø,Č©╬╗£╩┤_;¤oŽÓī”─”▓┴,£p╔┘▓╗▒žę¬Ą──źōp║═╣”┬╩ōp╩¦;ÖCŲ„╚╦╦┘Č╚┐ņ,┴”┴┐┤¾,ī”┐╣ąįÅŖ;¤oŽÓī”─”▓┴,čėķL┴╦▌å▌Sē█├³;▒Żūo┴╦ļŖÖCŻ¼┐╣ø_ō¶ąį║├
▄ć▌å╩Ū▌å╩ĮęŲäėÖCŲ„╚╦Ą─ęŲäėÖCśŗ,
ę└ō■═©▀^3▌S(X,Y,Z) Ė„ūįĄ─╝ė╦┘Č╚Öz£y║═Öz£yĖ„▌SŽÓī”╗∙£╩Ą─▐DĮŪŲ½▓ŅĄ─æTąįī¦║ĮŽĄĮyüĒŪ¾ĮŌ;ė├╦┘Č╚═ė┬▌āxĄ╚Ū¾Ą├├┐å╬╬╗ĢrķgĄ─ęŲäėŠÓļx║═å╬╬╗ĢrķgĄ─ĘĮ╬╗ūā╗»Ż¼ėŗ╦Ń│÷├┐éĆĢr┐╠Ą─╬╗ų├║═ĘĮ╬╗
ÖCŲ„╚╦Ą─┤¾─XĄ─ū„ė├ų„ę¬╩Ūßśī”«öŪ░šZ┴xĪó╬─ūųĄ─└ĒĮŌūRäe│÷╚╬äš─┐ś╦, ▓óĮY║Ž▌ö╚ļĄ─łDŽ±ą┼Žó,į┌ŁhŠ│ųąūRäe│÷▓┘ū„ī”Ž¾;ū÷│÷║Ž└ĒĄ─ųĖ┴Ņ╚╬äš═Ųī¦,▓ó╔·│╔ąĪ─XĄ─ł╠ąąųĖ┴Ņ
╚ń║╬īŹĢrĪ󊽣╩Ė·█Ö─®Č╦ł╠ąąŲ„┼c▒╗▓┘ū„╬’¾wų«ķgĄ─┐šķgŠÓļx║═╬╗ų├ą┼Žó;╚ń║╬š²┤_▀xō±Ė·Į╗╗ź╬’¾wĄ─▓┘ū„╬╗ū╦;ÖCŲ„╚╦į┌īŹļH▓┘ū„ųą½@╚ĪūŅā×ūź╚Īū╦æB║═╬╗ų├Ą──▄┴”